


The Auric Wisdom Xenso Hand is a tendon-driven anthropomorphic robotic hand, serving as a standardized hardware platform for hands-on robotics research, education, and algorithm.
Bionic Design:
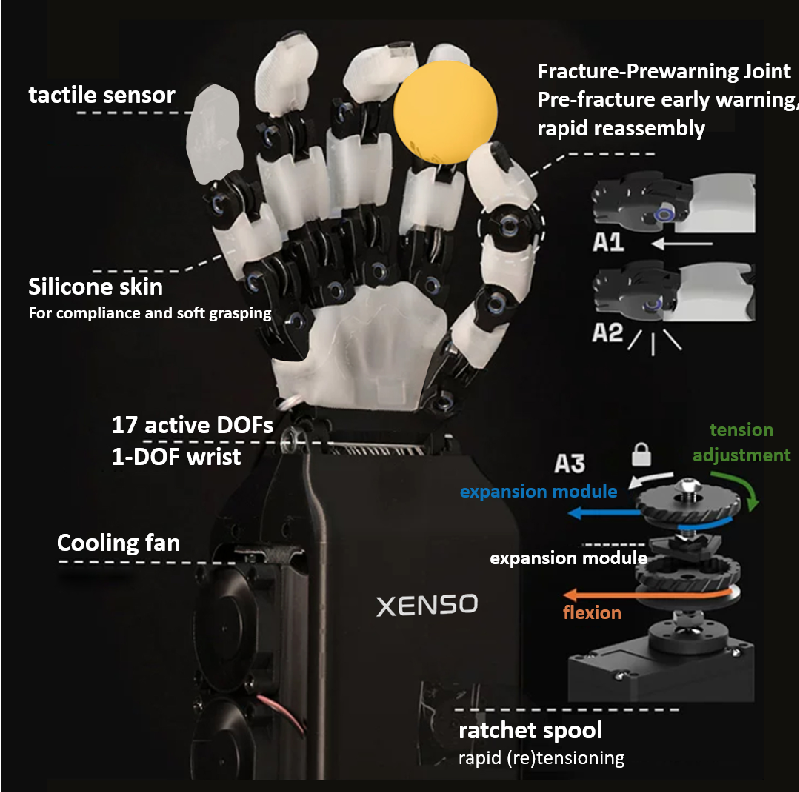
Engineered to human hand proportions and joint layout, replicating MCP, PIP, and ABD joint characteristics.
Features 17 degrees of freedom (16 in fingers + 1 in wrist), including an opposable thumb and active wrist.
Capable of directly manipulating tools and objects designed for human hands, significantly simplifying teleoperation workflows and enhancing efficiency in human hand data collection and training adaptation.
Reliability Design:
Joint Overload Protection: Triggers controlled dislocation when load exceeds threshold, preventing damage to core components.
Auto-Calibration System: Ensures long-term operational accuracy.
Low-Friction Tendon Drive Path: Reduces energy loss and improves response speed.
Modular Architecture: Facilitates maintenance and functional expansion.
Long-Duration Stability Validation: Free from tendon loosening, rupture, or similar failures; verified for reliability, robustness, and effectiveness through extended-cycle task validation.
Development Interfaces: Provides standardized open APIs, supporting researchers, educators, and developers in customized development across diverse scenarios, thereby lowering the barrier to dexterous manipulation algorithm research.
Application Value: Delivers highly reliable hardware support for the deployment of reinforcement learning technologies in dexterous manipulation, accelerating the translation from fundamental research to industrial applications.